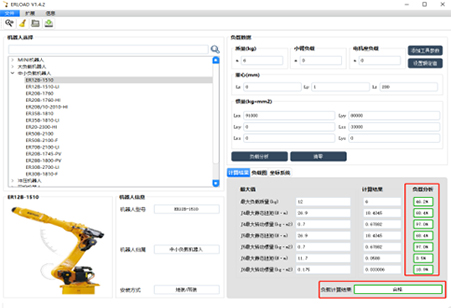
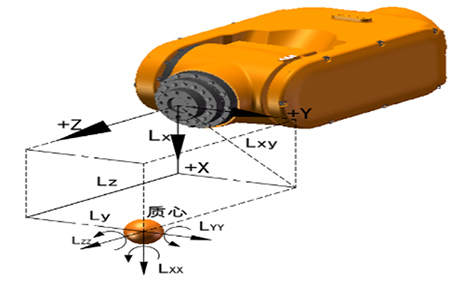
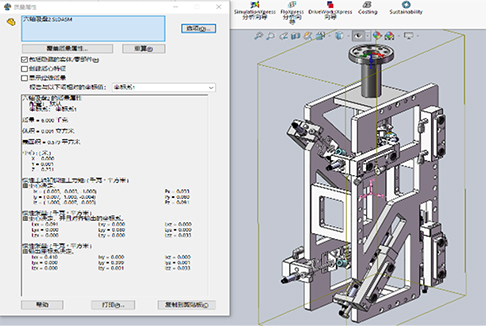
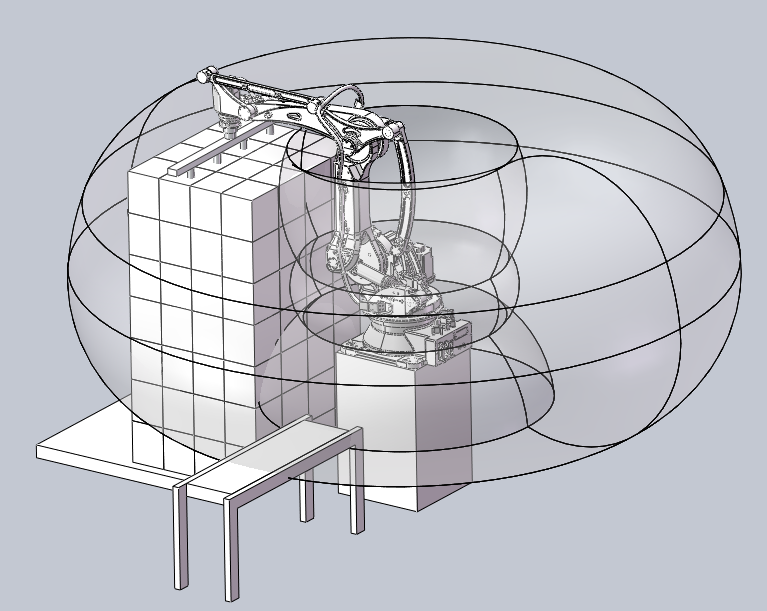
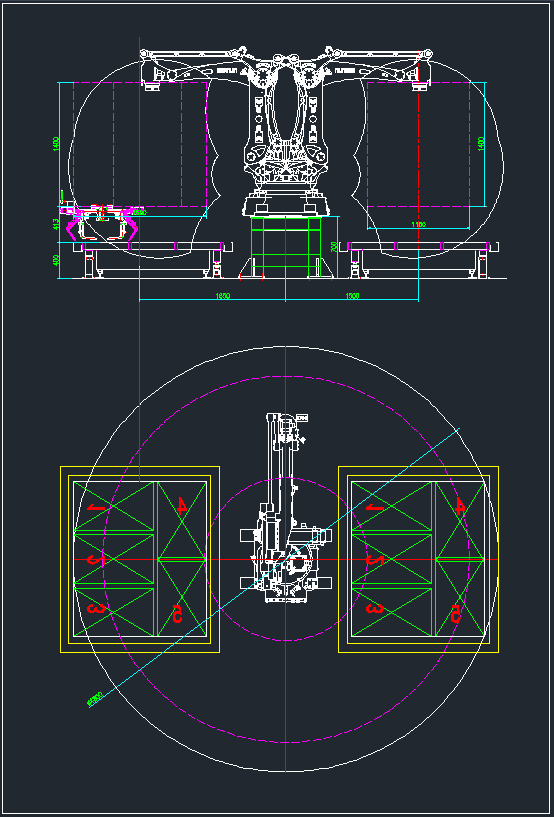
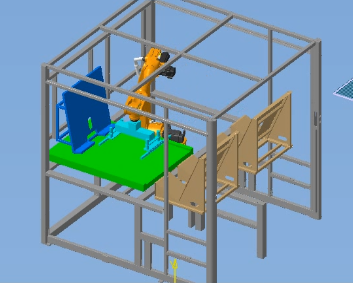
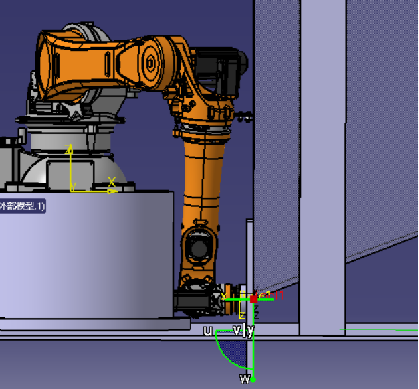
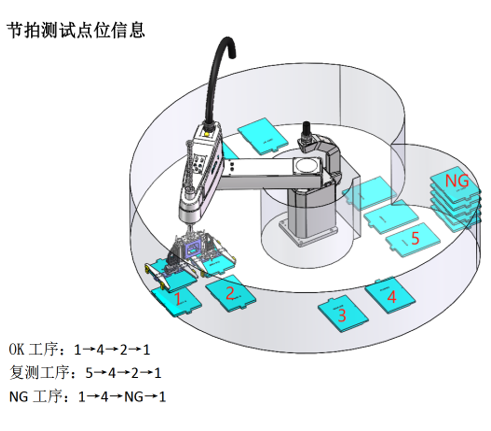
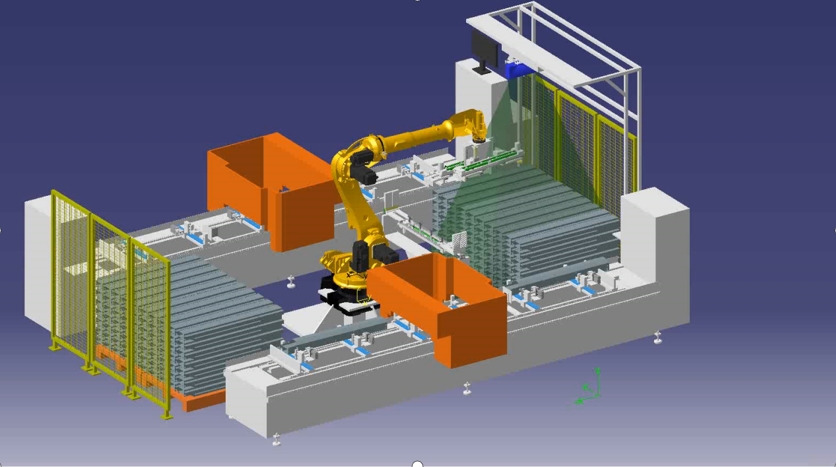
售前评估2026年3月23日服务支持 217 售前技术支持功能介绍 1.机器人基本选型 选型获取资料信息 负载:客户项目需要负载工况,工件重量+抓手重量等; 臂展:项目需要机器人最大的工作范围; 机器人与客户设备通讯所需要的通讯方式; 机器人重复定位精度,防尘、防水等工况需求信息,涉及机器人的重复定位精度及IP防护等级; 项目是否含第七轴,涉及机器人互联线缆是否需要选配柔性线缆等。 2.抓具负载惯量核算 惯量核算资料信息 机器人载荷不仅取决于负载的质量,还与负载的质心、机器人的运行速度和加速度有关; 一般在客户的负载接近机器人的最大负载或负载偏心较大,需核算抓具的负载惯量; 超转矩、超惯量对机器人的性能、寿命、零件等均有影响。 前期需要搜集的资料信息: 需要提供详细带材料属性(可评估质量属性)的工装夹具三维模型或质量属性数据截图; 如果模型是中间格式(STEP)的三维模型,不带材料属性,需额外提供材料清单或夹具及工件的实际重量信息。 3.位置可达性/干涉性模拟 动作流程比较简单的四轴搬运码垛项目,评估机器人可达性: 通过看机器人包络图,是否覆盖需要达到码垛高度,覆盖垛型的范围,做一个前期的判断; 埃斯顿机器人产品线提供了全部机型的详细包络图图纸,可以提供给客户的技术人员使用; 当客户项目使用机器人比较接近极限位置,设计人员无法判断机器人可达性; 当项目空间狭小与周边设备可能会发生干涉风险时,为客户提供仿真模拟判断; 通过仿真模拟机器人实际的工艺流程,选取机器人路径点位,验证机器人是否可达以及避开与周边设备的干涉风险。 4.节拍模拟 前期需要搜集的资料信息: 需要提供项目三维方案布局(能表达清楚机器人的运动点位信息); 抓手模型及重量等信息; 机器人的动作流程文档。 5.三维动画仿真 前期需要搜集的资料信息: 需要提供完整的项目三维方案模型(STEP格式); 项目完整的工艺流程及机器人的动作流程描述文档。 下一篇: 安装调试 相关推荐 安装调试 2026年3月23日 214 埃斯顿专业调试团队凭借丰富经验实现机器人快速高效投运,通过精准调控循环时间与电机扭矩优化运行效能,确保设备具备高可靠性、低能耗及长生命周期特性。 ESTUN的替换服务致力于推动可持续发展,相比全新的设备安装,老产线的升级改造,相比单独替换... 查看全文
安装调试 2026年3月23日 214 埃斯顿专业调试团队凭借丰富经验实现机器人快速高效投运,通过精准调控循环时间与电机扭矩优化运行效能,确保设备具备高可靠性、低能耗及长生命周期特性。 ESTUN的替换服务致力于推动可持续发展,相比全新的设备安装,老产线的升级改造,相比单独替换... 查看全文
 埃斯顿ESTUN-工业机器人_机械臂官网
埃斯顿ESTUN-工业机器人_机械臂官网